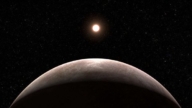
【新唐人北京時間2025年08月20日訊】目前科技界不僅聚焦於AI發展,也致力於研發更多元的機器人。近期,韓國科學家研發一款薄如蟬翼的機器人,它能透過AI和即時編程實現快速折疊和即時改變形狀,完成移動、抓取等精細動作。這項技術未來有望應用於太空探索、醫療等充滿變數的複雜環境之中。
長期以來,能夠適應環境挑戰的變形機器人,一直是科學家們的重點研究目標之一,但傳統的許多變形機器人受到固定鉸鏈的限制,導致其變形模式單一且需預先設定,無法真正做到自由變形。為此,科學家們在尋求更好的變形的機器人,以便它們可以幫人類執行一些困難的任務。
為突破此限制,專門研發機器人的韓國科學技術院(KAIST)的研究團隊成功開發出一款可自由折疊的薄型機器人。它可以根據周圍環境進行實時編程,變成一種可以適應環境的變形機器人,將為機器人技術開闢更多的可能性。這項研究成果於8月初刊登在《自然通訊》雜誌上。
這種可折疊的薄型機器人面積約6平方公分,厚度僅15微米(μm),由聚醯亞胺(PI)和聚二甲基矽氧烷(PDMS)等多層柔性聚合物基板構成。其聚合物基板中均勻嵌入308個互連的薄型金屬電阻,形成類似柔性電路板的模樣。

這些金屬電阻在基板內充當加熱器和溫度感測器,當特定區域的電阻被加熱後,這2種聚合物會因熱膨脹係數的差異而產生形變。研究人員就是利用這種特性,賦予薄型機器人改變形狀或移動的能力。
此外,研究團隊對薄型機器人引入「可現場編程」概念。過程中,使用者只要對機器人下達指令(如折疊位置、方向和折疊量),系統便會精準加熱對應的金屬電阻,使其迅速折疊或形變成指令中的形狀。
他們還透過精確的溫度分布控制,讓薄型機器人不僅提升了摺疊精度,更能靈敏適應環境變化,大幅改善了傳統熱驅動折疊技術反應慢的問題。這項設計讓機器人無需複雜的硬體結構,即可高效運作。
研究團隊還演示,這款薄型機器人在接收到指令後,如何靈巧地摺疊並抓取不同形狀的物體。另外,他們將同樣的機械薄片放置地面上,它還能模擬生物的行走與爬行,展現了優異的仿生運動潛力。
研究人員指出,這款薄型機器人擁有卓越的環境適應能力,而能力均得益於機器人整合的演算法、深度神經網路軟體。未來有望應用於太空探索、醫療領域和災難響應等領域上,以協助人類解決那些複雜且棘手的問題。
團隊還表示,未來會持續改進這款薄型機器人的機械性能,以增強它的承載能力和形變響應速度。同時,他們也會持續尋找性能更優異的熱響應材料,或設計冷卻效率更高的結構去支撐這項技術,讓這項技術得以早日進入實際應用。
韓國科學技術院教授金正(Jung Kim)對該校的新聞室表示,「這項研究讓我們距離實現『形態智能』更近了一步。這項概念認為形狀本身就體現了智能,並能實現智能運動。」
他接著表示,「我們計劃將其發展成為下一代物理AI平台,改進它的形狀結構以實現更大負載和響應速度,最終應用到災難響應機器人、客製化醫療輔助設備和太空探索等領域上。」
研究作者之一、韓國科學技術院博士研究員朴鉉奎(Hyunkyu Park)對台灣公共電視新聞台(公視)表示,「這種材料的任何部分都可以摺疊,我們採用演算法和軟體介面來解碼使用者的意圖,包括折疊的位置和折疊的程度。」
研究共同作者、韓國慶北國立大學(KNU)助理教授鄭勇錄(Yongrok Jeong)則表示,「我們的機器人即時重新定義了摺疊點的位置,因此我們只需改變紙張上摺疊的模式,就能製作出各種不同的變形方案。」
本研究由韓國國家研究基金會(科學技術資訊通信部)資助,資助代號為RS-2021-NR059641、2021R1A2C3008742。
(轉自大紀元/責任編輯:葉萍)